Core Technologies of Autonomous Vehicles
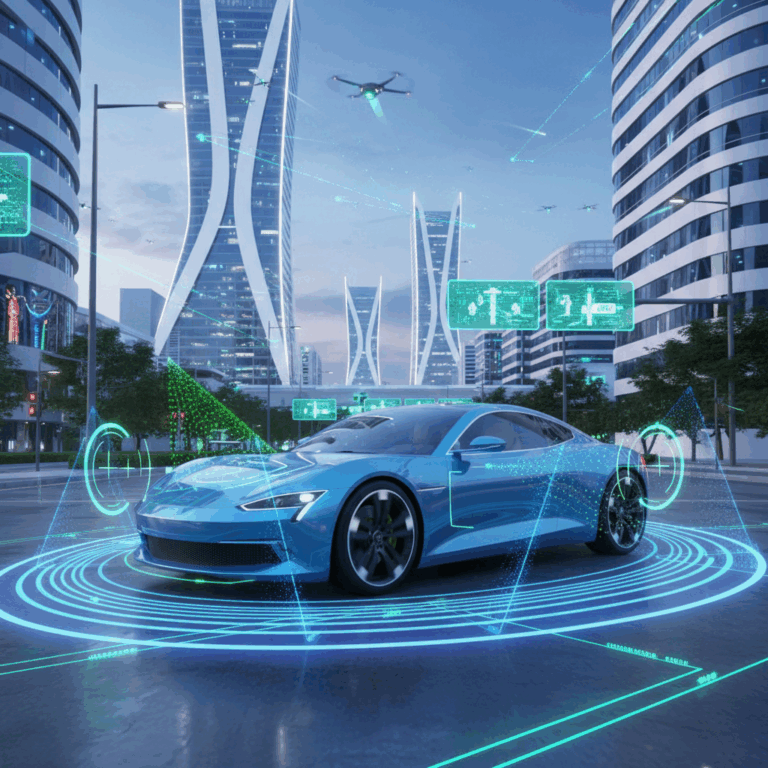
Autonomous vehicles depend on advanced sensor systems and powerful computing to navigate safely without human input. These technologies work together to perceive and interpret the driving environment in real-time.
Key components include sensor arrays like LiDAR, radar, cameras, and GPS, which continuously collect data. This data feeds sophisticated AI algorithms to enable precise decision-making and vehicle control.
Together, these core technologies form the foundation for reliable and safe self-driving systems, paving the way for the future of autonomous mobility.
Sensors: LiDAR, Radar, Cameras, and GPS
Autonomous vehicles utilize a variety of sensors to build an accurate environmental model. LiDAR uses lasers to create detailed 3D maps, while radar detects objects and their speed under diverse conditions.
Cameras capture visual details like traffic signals and lane markings, providing rich contextual information. Meanwhile, GPS offers global positioning data crucial for navigation.
Combining these sensors allows vehicles to detect pedestrians, other vehicles, and obstacles in real time, ensuring comprehensive situational awareness.
AI and Computing Systems for Perception and Decision-Making
High-performance computing platforms process massive sensor data rapidly. Running AI algorithms such as deep learning and convolutional neural networks, these systems interpret inputs to recognize objects and predict their movements.
This intelligence enables the vehicle to make instantaneous decisions on steering, acceleration, and braking, mimicking human driving judgment with superior consistency and speed.
Efficient software-hardware integration ensures real-time responsiveness, a critical requirement for maintaining safety in dynamic traffic scenarios.
Data Management and Localization
Efficient data management is essential for autonomous vehicles due to the massive information flow from sensors. Localization combines several technologies for precise positioning.
High-speed data transfer networks and advanced AI algorithms process this data, empowering vehicles to accurately perceive their environment and navigate safely.
Localization methods use GPS, inertial sensors, and high-definition maps to provide centimeter-level accuracy, supporting autonomous driving in complex environments.
Automotive Ethernet for High-Bandwidth Data Transfer
Automotive Ethernet supports the enormous data volume generated by sensors in real time. Its high bandwidth and low latency enable rapid communication between vehicle components.
This network infrastructure is designed to handle multiple data streams simultaneously, ensuring that sensor inputs reach processing units without delay.
By providing scalable and reliable connectivity, automotive Ethernet plays a crucial role in maintaining the autonomous system’s responsiveness and safety standards.
Localization Techniques: GPS, Inertial Sensors, and HD Maps
GPS provides global positioning but can be imprecise in urban areas. Inertial sensors measure vehicle motion to complement GPS and maintain accurate tracking.
High-definition maps contain detailed information about road geometry and landmarks, helping the vehicle align its position precisely within the environment.
Combining these technologies ensures robust localization, critical for safe navigation and maneuvering in diverse driving conditions.
AI Algorithms: Deep Learning and Object Recognition
Deep learning algorithms process sensor data to detect and classify objects such as vehicles, pedestrians, and obstacles. These models improve through continuous training.
Convolutional neural networks are widely applied for image and sensor data analysis, enabling the vehicle to interpret surroundings with high accuracy.
By learning complex patterns, AI enhances decision-making capabilities, allowing autonomous vehicles to predict behaviors and react appropriately to dynamic situations.
Connectivity and Communication
Connectivity is a cornerstone of autonomous vehicle functionality, enabling cars to interact with their environments beyond onboard sensors. This communication exchange supports safer, more efficient driving.
The integration of advanced communication systems allows vehicles to receive and share critical real-time information—such as traffic, hazards, and road conditions—that sensors alone cannot detect.
These interactions pave the way for cooperative driving strategies, improving traffic flow and reducing accidents by anticipating potential risks earlier.
Vehicle-to-Everything (V2X) Communication
V2X communication enables autonomous vehicles to connect with other vehicles, infrastructure, pedestrians, and networks, forming a comprehensive communication ecosystem. This system extends situational awareness.
By sharing data such as speed, location, and intentions, vehicles can predict and respond to traffic events well before onboard sensors detect them, significantly increasing safety margins.
V2X supports various communication types, including vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I), promoting coordinated responses to dynamic road conditions and traffic management.
This technology is fundamental to implementing intelligent transportation systems that enhance overall mobility through real-time information exchange.
Enhancing Safety and Traffic Efficiency Through Connectivity
Connectivity technologies reduce accidents by alerting vehicles to hazards like sudden stops or obstacles even if they are beyond sensor range, thus minimizing human error in driving decisions.
Additionally, connectivity optimizes traffic flow by enabling cooperative adaptive cruise control and coordinated lane changes, which reduce congestion and emissions.
Real-time data exchange helps traffic managers monitor conditions continuously, allowing dynamic adjustments to signal timing and routes, which improves on-road efficiency.
Ultimately, these connected systems work together to create safer, smoother, and more environmentally friendly transportation networks, accelerating the benefits of autonomous mobility.
Impact on Mobility and Urban Planning
The rise of autonomous vehicles is reshaping how societies approach mobility and urban planning. By integrating self-driving technology, cities can envision safer, more efficient transportation systems with fewer accidents due to human error.
Autonomous vehicles not only bring enhanced safety but also influence urban design, potentially reducing the demand for extensive parking spaces and promoting smarter traffic flow through optimized routing and connectivity.
This paradigm shift invites urban planners to rethink space allocation and infrastructure, aiming to create more sustainable and accessible environments around autonomous mobility.
Transforming Transportation and Reducing Human Error
Autonomous vehicles significantly reduce human error, which accounts for the vast majority of traffic accidents worldwide. This improvement directly enhances road safety and lowers accident-related injuries and fatalities.
Additionally, autonomous driving systems enable smoother traffic flow and decreased congestion by maintaining optimal speeds and safe following distances, which human drivers often struggle to manage consistently.
The technology also aids mobility for non-drivers, such as the elderly and disabled, transforming transportation into a more inclusive and dependable service across society.
Future of Urban Design and Public Transit Integration
Urban design will evolve to accommodate self-driving vehicles by prioritizing multi-modal transit hubs and reducing the need for large parking facilities, freeing space for public use and green areas.
Public transit systems will integrate autonomously driven shuttles and buses, creating seamless connections that enhance the first- and last-mile travel experience, making transit more convenient and attractive.
These changes promote sustainable urban growth, encouraging less car ownership and supporting shared mobility models, which contribute to reduced emissions and improved quality of city life.